HYBRID KNEE
Pursuit of the ultimate integration
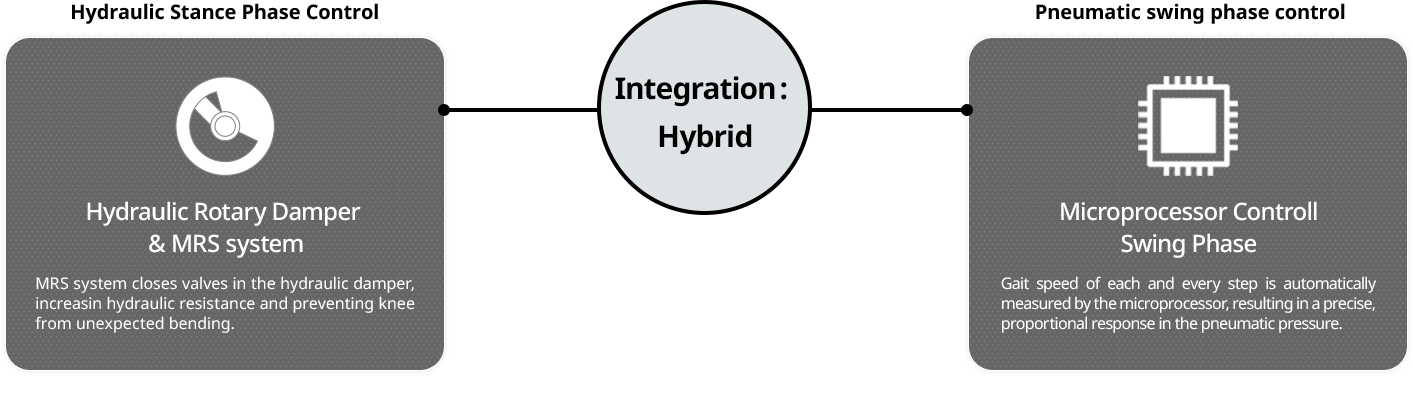
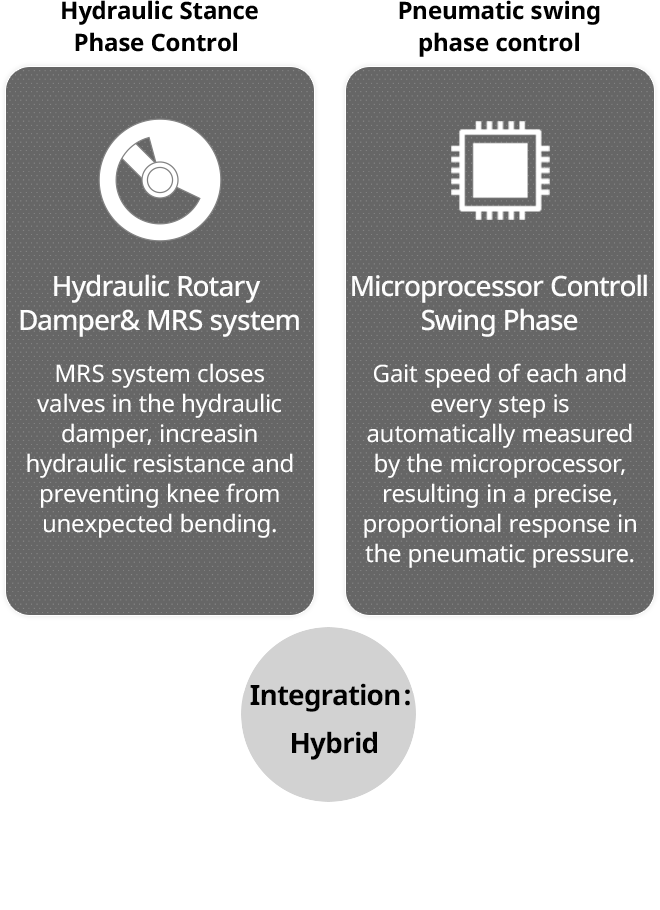
The seamless integration of technology between the hydraulic system and microprocessor-controlled pneumatic system ensures optimal utilization of the benefits of each at the most effective moment in the gait cycle.
Mechanism for the ultimate integration






Stability and Comfort of walking
Mechanism of Reaction Force Sensing (MRS) system detects and measures the ground reaction force with each step and moderates the hydraulic pressure accordingly to allow smooth walking and prevent knee from unexpected bending.


Step Over Step
Of huge significance to every amputee is the ability to walk downstairs and inclines step over step.
Yielding resistance can be set to the exact needs of the user and allow comfortable walking on uneven terrain.


Able to walk with the flow of people
Microprocessor detects gait speed of user and automatically adjusts pneumatic pressure to match user’s cadence.


Lower Resistance & Lighter Swing
User has no need to swing residual limb strongly.
User is more comfortable and consumes less energy with each stride.
VOICE

Patissier.
I have been using a prosthetic leg for 18 years. Through my work, I feel a sense of accomplishment that I am evolving despite my physical disability.
Ice Sledge Athlete
When I walked out of the hospital, I thought how not barrier-free it was, with little steps, roads that were not straight, etc. Nowadays I am used to my prosthetic leg and go about my daily life without problems, even on hills and such.
Specification

| Name | Hybrid Knee | ||
|---|---|---|---|
| Type | NI-C311 | NI-C311s | NI-C313 |
| Proximal connection | Pyramid adapter | Pyramid adapter | Threated connector |
| Distal connection | Tube clamp(φ34㎜) | ||
| Option | – | extension assist spring | – |
| Height | 296 | 296 | 292 |
| Knee weight | 1375g | 1375g | 1385g |
| Knee flexion angle | 140° | ||
| Weight limit | K3(MOB3):125kg(275lb), K4(MOB4):100kg(220lb) ISO10328 P6(A-125) |
||
| Battery life | Approximately 2 years | ||
| Activity level | K2-K3 | ||
*Specifications are subject to change without notice.
KNEE Collection

ALLUXTM2
The highest class in the 4-Bar knee joints.
The world’s first; 4-Bar linkage mechanism and microprocessor control knee.
Symphony
The Symphony Knee is designed with a unique,
6-Bar polycentric structure that provides an extremely high level of stability during stance phase.
Check here for catalogs download.
